wikiHow is a “wiki,” similar to Wikipedia, which means that many of our articles are co-written by multiple authors. To create this article, 85 people, some anonymous, worked to edit and improve it over time.
wikiHow marks an article as reader-approved once it receives enough positive feedback. This article has 22 testimonials from our readers, earning it our reader-approved status.
This article has been viewed 1,684,797 times.
Learn more...
Do you want to learn how to build your own robot? There are a lot of different types of robots that you can make by yourself. Most people want to see a robot perform the simple tasks of moving from point A to point B. You can make a robot completely from analog components or buy a starter kit from scratch! Building your own robot is a great way to teach yourself both electronics as well as computer programming.
Steps
Assembling the Robot
-
1Gather your components. To build a basic robot, you'll need several simple components. You can find most, if not all, of these components at your local electronics hobby shop, or several online retailers. In fact, some basic kits may include all of these components as well. This robot does not require any soldering:
- Arduino Uno (or other microcontroller)[1]
- 2 continuous rotation servos
- 2 wheels that fit the servos
- 1 caster roller
- 1 small solderless breadboard (look for a breadboard that has two positive and negative lines on each side)
- 1 distance sensor (with four-pin connector cable)
- 1 mini push-button switch
- 1 10kΩ resistor
- 1 USB A to B cable
- 1 set of breakaway headers
- 1 6 x AA battery holder with 9V DC power jack
- 1 pack of jumper wires or 22-gauge hook-up wire
- Strong double-sided tape or hot glue
-
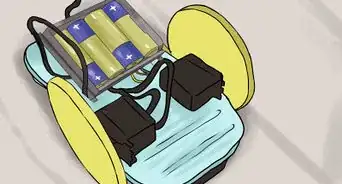
2Flip the battery pack over so that the flat back is facing up. You'll be building the robot's body using the battery pack as a base.Advertisement
-
3Align the two servos on the end of the battery pack. This should be the end that the battery pack's wire is coming out of The servos should be touching bottoms, and the rotating mechanisms of each should be facing out the sides of the battery pack. The servos must be properly aligned so that the wheels go straight. The wires for the servos should be coming off the back of the battery pack.
-
4Affix the servos with your tape or glue.[2] Make sure that they are solidly attached to the battery pack. The backs of the servos should be aligned flush with the back of the battery pack.
- The servos should now be taking up the back half of the battery pack.
-
5Affix the breadboard perpendicularly on the open space on the battery pack. It should hang over the front of the battery pack just a little bit and will extend beyond each side. Make sure that it is securely fastened before proceeding. The "A" row should be closest to the servos.
-
6Attach the Arduino microcontroller to the tops of the servos. If you attached the servos properly, there should be a flat space made by them touching. Stick the Arduino board onto this flat space so that the Arduino's USB and Power connectors are facing the back (away from the breadboard). The front of the Arduino should be just barely overlapping the breadboard.
-
7Put the wheels on the servos. Firmly press the wheels onto the rotating mechanism of the servo. This may require a significant amount of force, as the wheels are designed to fit as tightly as possible for the best traction.
-
8Attach the caster to the bottom of the breadboard. If you flip the chassis over, you should see a bit of breadboard extending past the battery pack. Attach the caster to this extended piece, using risers if necessary. The caster acts as the front wheel, allowing the robot to easily turn in any direction.[3]
- If you bought a kit, the caster may have come with a few risers that you can use to ensure the caster reaches the ground. i








Wiring the Robot
-
1Break off two 3-pin headers. You'll be using these to connect the servos to the breadboard. Push the pins down through the header so that the pins come out at an equal distance on both sides.
-
2Insert the two headers into pins 1-3 and 6-8 on row E of the breadboard. Make sure that they are firmly inserted.[4]
-
3Connect the servo cables to the headers, with the black cable on the left side (pins 1 and 6). This will connect the servos to the breadboard. Make sure the left servo is connected to the left header and the right servo to the right header.
-
4Connect red jumper wires from pins C2 and C7 to red (positive) rail pins. Make sure you use the red rail on the back of the breadboard (closer to the rest of the chassis).
-
5Connect black jumper wires from pins B1 and B6 to blue (ground) rail pins. Make sure that you use the blue rail on the back of the breadboard. Do not plug them into the red rail pins.
-
6Connect white jumper wires from pins 12 and 13 on the Arduino to A3 and A8. This will allow the Arduino to control the servos and turn the wheels.
-
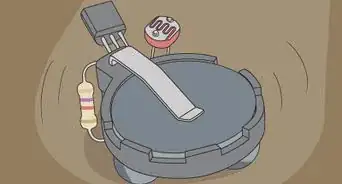
7Attach the sensor to the front of the breadboard. It does not get plugged into the outer power rails on the breadboard, but instead into the first row of lettered pins (J). Make sure you place it in the exact center, with an equal number of pins available on each side.
-
8Connect a black jumper wire from pin I14 to the first available blue rail pin on the left of the sensor. This will ground the sensor.
-
9Connect a red jumper wire from pin I17 to the first available red rail pin to the right of the sensor. This will power the sensor.
-
10Connect white jumper wires from pin I15 to pin 9 on the Arduino, and from I16 to pin 8. This will feed information from the sensor to the microcontroller.










Wiring the Power
-
1Flip the robot on its side so that you can see the batteries in the pack. Orient it so that the battery pack cable is coming out to the left at the bottom.
-
2Connect a red wire to the second spring from the left on the bottom. Make sure that the battery pack is oriented correctly.
-
3Connect a black wire to the last spring on the bottom-right. These two cables will help provide the correct voltage to the Arduino.
-
4Connect the red and black wires to the far-right red and blue pins on the back of the breadboard. The black cable should be plugged into the blue rail pin at pin 30. The red cable should be plugged into the red rail pin at pin 30.
-
5Connect a black wire from the GND pin on the Arduino to the back blue rail. Connect it at pin 28 on the blue rail.
-
6Connect a black wire from the back blue rail to the front blue rail at pin 29 for each. Do not connect the red rails, as you will likely damage the Arduino.
-
7Connect a red wire from the front red rail at pin 30 to the 5V pin on the Arduino. This will provide power to the Arduino.
-
8Insert the push button switch in the gap between rows on pins 24-26. This switch will allow you to turn off the robot without having to unplug the power.
-
9Connect a red wire from H24 to the red rail in the next available pin to the right of the sensor. This will power the button.
-
10Use the resistor to connect H26 to the blue rail. Connect it to the pin directly next to the black wire that you connected a few steps ago.
-
11Connect a white wire from G26 to pin 2 on the Arduino. This will allow the Arduino to register the push button.











Installing the Arduino Software
-
1Download and extract the Arduino IDE. This is the Arduino development environment and allows you to program instructions that you can then upload to your Arduino microcontroller. You can download it for free from arduino.cc/en/main/software. Unzip the downloaded file by double-clicking it and move the folder inside to an easy to access location. You won't be actually installing the program. Instead, you'll just run it from the extracted folder by double-clicking arduino.exe.[5]
-
2Connect the battery pack to the Arduino. Plug the battery back jack into the connector on the Arduino to give it power.
-
3Plug the Arduino into your computer via USB. Windows will likely not recognize the device.
-
4Press .⊞ Win+R and type devmgmt.msc. This will launch the Device Manager.
-
5Right-click on the "Unknown device" in the "Other devices" section and select "Update Driver Software." If you don't see this option, click "Properties" instead, select the "Driver" tab, and then click "Update Driver."
-
6Select "Browse my computer for driver software." This will allow you to select the driver that came with the Arduino IDE.
-
7Click "Browse" then navigate to the folder that you extracted earlier. You'll find a "drivers" folder inside.
-
8Select the "drivers" folder and click "OK." Confirm that you want to proceed if you're warned about unknown software.








Programming the Robot
-
1Start the Arduino IDE by double-clicking the arduino.exe file in the IDE folder. You'll be greeted with a blank project.
-
2Paste the following code to make your robot go straight. The code below will make your Arduino continuously move forward.
#include <Servo.h> // this adds the "Servo" library to the program // the following creates two servo objects Servo leftMotor; Servo rightMotor; void setup() { leftMotor.attach(12); // if you accidentally switched up the pins for your servos, you can swap the numbers here rightMotor.attach(13); } void loop() { leftMotor.write(180); // with continuous rotation, 180 tells the servo to move at full speed "forward." rightMotor. write(0); // if both of these are at 180, the robot will go in a circle because the servos are flipped. "0," tells it to move full speed "backward." }
-
3Build and upload the program. Click the right arrow button in the upper-left corner to build and upload the program to the connected Arduino.
- You may want to lift the robot off of the surface, as it will just continue to move forward once the program is uploaded.
-
4Add the kill switch functionality. Add the following code to the "void loop()" section of your code to enable the kill switch, above the "write()" functions.
if(digitalRead(2) == HIGH) // this registers when the button is pressed on pin 2 of the Arduino { while(1) { leftMotor.write(90); // "90" is neutral position for the servos, which tells them to stop turning rightMotor.write(90); } }
-
5Upload and test your code. With the kill switch code added, you can upload and test the robot. It should continue to drive forward until you press the switch, at which point it will stop moving. The full code should look like this:
#include <Servo.h> // the following creates two servo objects Servo leftMotor; Servo rightMotor; void setup() { leftMotor.attach(12); rightMotor.attach(13); } void loop() { if(digitalRead(2) == HIGH) { while(1) { leftMotor.write(90); rightMotor.write(90); } } leftMotor.write(180); rightMotor.write(0); }





Community Q&A
-
QuestionHow much time will it take to build a robot?
 Community AnswerThis depends on the complexity of the robot. You could build a simple robot in as little as a day. A more complex robot could take several several months.
Community AnswerThis depends on the complexity of the robot. You could build a simple robot in as little as a day. A more complex robot could take several several months. -
QuestionWhat is the device called that you need to move robotic hands, arms and legs?
 Community AnswerServos (servomotors) are usually used to move robotic arms. Regular servos have a limited circulation.
Community AnswerServos (servomotors) are usually used to move robotic arms. Regular servos have a limited circulation. -
QuestionWhy do I need to download the Arduino software?Community AnswerArduino code is very simplified and based off of C++. Other micro controllers are also available that use other software.


References
- ↑ https://www.robotshop.com/community/tutorials/show/how-to-make-a-robot-lesson-4-understanding-microcontrollers
- ↑ https://learn.adafruit.com/Cardboard-Robot-Inchworm/add-the-electronics
- ↑ http://makezine.com/projects/building-a-simple-arduino-robot/
- ↑ http://www.ladyada.net/learn/arduino/lesson3.html
- ↑ https://learn.sparkfun.com/tutorials/installing-arduino-ide/all
About This Article
To build a simple robot that can move on its own, purchase a starter kit, or assemble the components you need from an electronics supplier. You'll need a microcontroller, the small computer that will serve as your robot's brain; a pair of continuous rotation servos to drive the wheels; wheels that fit the servos; a caster roller; a small solderless breadboard for building your circuits; a battery holder; a distance sensor; a push button switch, and jumper wires. Affix the servos to the end of the battery pack with double-sided tape or hot glue, making sure the the rotating ends of the servos are on the long sides of the battery pack. Attach the breadboard to the battery pack next to the servos with the tape or hot glue. Place the microcontroller on the flat space on top of the servos and affix firmly there. Press the wheels firmly onto the spindles of the servos. Attach the caster to the front of the breadboard. The caster spins freely, and acts as the front wheel of the robot, making it easy to turn and roll in any direction. Plug the distance sensor to the front of your breadboard. Wire up your robot, connecting the servos, microcontroller, switch and battery pack to your breadboard. Connect your microcontroller to a computer via a USB cable. Upload a basic control program from your computer to the microcontroller. This robot can go forward, backward, stop, and turn away from obstacles. Test your robot on a smooth flat surface, and experiment to see what you can make it do. For more tips, including how to use Arduino software, read on!